勇于创新:数字位置反馈技术协助路虎BAR帆船队出征美洲杯


美洲杯级 (ACC) 竞赛帆船采用了一种称为帆翼的创新型风帆,它的工作原理如同飞机机翼,在风的作用下,可产生驱动帆船前进的“升力”。路虎BAR帆船队的参赛帆船取名“Rita”(内部代号R1),她有一个面积达103平方米的帆翼,高23.5米,与A320飞机的主机翼大小相当。这张大型多功能帆翼上安装有数量众多的活动部件,此外,它必须具有足够的强度和尽可能轻的重量;显然,它的设计和制造过程要面临许多巨大的工程挑战。R1是一种先进的双体船,高速前进时可凭借一对水翼浮出水面,犹如在水上飞行一般。这种水翼设计使得帆船达到了惊人的航行速度。
在R1上,全部控制翼面都是由液压传动装置驱动的,而要产生液压,则需要由船员中的“绞盘手”尽全力转动专用手摇曲柄来实现。由于连接液压传动装置和控制翼面的液压管路盘旋缠绕,布置错综复杂,路虎BAR帆船队意识到,这一定会降低舵手对帆翼的控制精度,因此他们希望直接测量控制翼面的运动,并为此联系到雷尼绍寻求帮助。
技术主管Finlay Evans博士和他的团队为帆翼上的控制翼面设计了一种特制的数字位置传感器(编码器),这样就可以获得更好的直接位置反馈数据。该解决方案既可在比赛中帮助舵手和船员更精确地操纵帆船,还能够在日常训练中采集高质量的帆船性能数据。
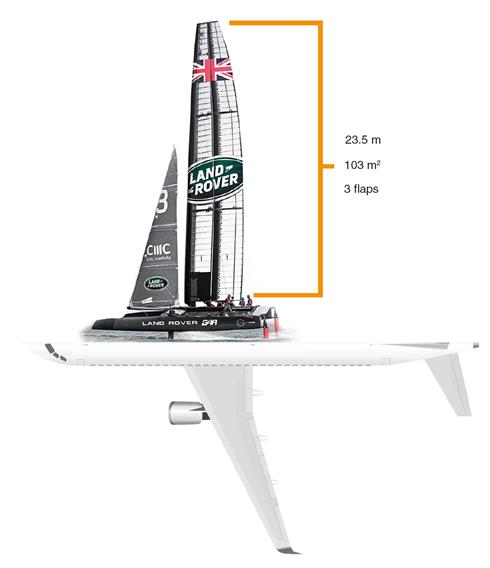 路虎BAR帆船队的竞赛帆船对比空客A320飞机
路虎BAR帆船队的竞赛帆船对比空客A320飞机请看Evans博士的详细介绍:

您在雷尼绍有何工作背景?
我是一名技术主管,在雷尼绍工作了17年,我拥有动力学和机械工程方面的技术背景。我之前的很多工作都与研发相关 — 寻找新创意和新技术,这也是吸引我参与路虎BAR项目的原因之一。
雷尼绍对您而言意味着什么?
雷尼绍很独特 — 她有四十年的发展历程,是英国领先的工程技术公司之一。坦率地说,雷尼绍代表着尖端的设计和制造水平,这里还有非常棒的工作环境,这就是路虎BAR帆船队相信我们能够胜任挑战的原因所在。
编码器安装在R1竞赛帆船的哪些地方?它们的作用是什么?
编码器安装在主帆翼上,共有四个:一个在顶部,两个在帆翼的主体上,另一个在底部。第五个编码器安装在桅杆底部的船体上。帆翼内自上而下安装的数个编码器可测量控制翼面(襟翼)的转动角度,桅杆上的编码器则可确定整个帆翼装置的攻角。此外,船体下方的两个编码器可测量左舵和右舵的位置。现在,这类帆船的航行速度可达到每小时60英里,巨大的冲击力将激起大量的浪花。编码器和电子设备处在含盐环境中,且频繁接触海水,这要求设备密封性能必须稳定可靠 — 尤其是那些靠近吃水线的设备。
您能否描述一下控制翼面在帆翼上是如何工作的?
传统的风帆是指帆船桅杆上利用风力的布篷,当空气流动时,风帆常被吹成曲面。而帆翼更像是飞机的机翼,帆翼上的控制翼面如同飞机机翼上的襟翼,可绕支点转动。舵手可根据风向与所需前进方向的夹角,调节控制翼面以获得更大的推力。帆翼上有三块主要的控制翼面,要转动这些控制翼面,需要使用线缆左右拉动被称为锤头的控制翼面内部水平架板。就编码器而言,弧形栅尺安装在转动的水平架板上,而读数头则安装在帆翼的翼肋上。在船舵位置处,我们采用了相同的技术 — 相同的组件模块和相似的布局。
 R1帆船在百慕大群岛站比赛中高速前进
R1帆船在百慕大群岛站比赛中高速前进为何要在控制翼面上安装位置编码器?
舵手使用驱动装置来转动这些控制翼面,但驱动装置不一定要与控制翼面安装在同一位置,因为可以使用线缆(绳索)来传递驱动力。最初只在驱动装置处进行位置测量,但由于驱动装置与控制翼面相距很远,因此由此推算出的翼面位置可能并不准确。
通过直接在控制翼面上,或尽可能接近它的位置安装编码器,我们可以获得有关控制翼面角度位置的更为精确的读数。
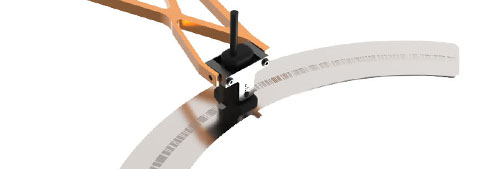
 安装在锤头(控制翼面内部水平架板)上的编码器
安装在锤头(控制翼面内部水平架板)上的编码器
您为什么选择磁编码器而不是光栅?
就精密编码器而言,海上的工作环境十分恶劣,最初摆在我们面前可供选择的技术包括光栅和磁编码器两种。然而,考虑到海面上随时可能出现的强风以及帆船高速航行时四处溅起的水花 — 开放式光栅可能会遇到不小的麻烦,因为光路将无法保持畅通。在这种情况下,磁编码器是唯一可行的选择。磁编码器可完全密封,因此具有更好的抗污性能,而这一点对于海上应用而言至关重要。能够更好地抵御恶劣环境的影响是我们选择磁编码器的主要原因之一,其他原因还包括其体积小巧,可安装在帆翼翼肋处的狭小空间内。我们以雷尼绍关联公司RLS生产的LinACE™模块为基础,设计出一款新的编码器,该编码器在翼肋上具有最小的安装孔尺寸。我们制作的密封编码器克服了两个主要技术难题:安装空间狭小、工作环境恶劣;该编码器体积小巧、密封性高,并带有一个一体式滑动支架,用于保持读数头和弧形栅尺的间隙相对固定。
磁编码器的工作原理是什么?
在本例中,我们将一块磁体粘贴在霍尔传感器阵列的背面,并与刻有一系列刻线(凹槽)的铁磁栅尺一起使用。栅尺表面的不同凹槽可使磁体附近的局部磁场发生变化,这样一来,当编码器移经栅尺时,霍尔传感器便能检测到磁通的变化,然后将其转换为位置测量信号。由于栅尺上每条凹槽的磁通模式各不相同,因此可确定栅尺任意处的绝对位置。传感器读数头是完全密封的,以保护内部灵敏的电子元件不受海上恶劣环境的影响。外部的聚合物涂层起到防磨损保护作用,栅尺可以完全接触到该涂层,这还可确保读数头和栅尺之间有合适的间隙。磁编码器的性能不受密封外壳的影响。
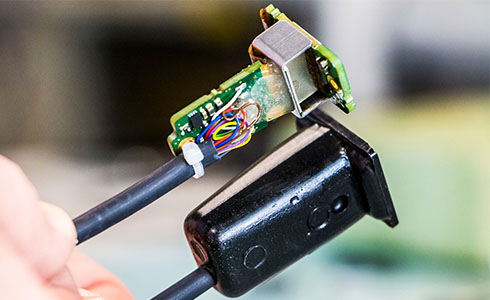 RLS LinACE™重新采用防水外壳封装
RLS LinACE™重新采用防水外壳封装设计过程主要围绕对编码器的要求展开。在帆翼上,越靠近顶部位置,质量上的微小变化对帆船的稳定性和性能的影响越大。空间是一个首要的考虑因素 — 因为磁编码器直接安装在帆翼翼肋的水平支板上,而此处的空间和间隙非常狭窄。与此同时,此帆翼大约24米高,根据空气动力学设计,帆翼不同高度的各个部位会发生不同程度的纵向弯曲。我们必须要克服的问题是:当锤头上的栅尺来回转动时,由于帆翼扭曲的原因,栅尺可能会旋转到平面以外。
我们传统的编码器设计在状态相对稳定的直线或旋转轴上工作,因此要求的间隙比较小。而在这里,弧形栅尺不仅会转动,还可能沿轴向移动并发生扭转,这对我们的测量精度提出了更为严格的要求。我们必须找出一个当栅尺在旋转平面以外发生扭转和俯仰时仍可保持测量精度的方法。就抗污能力而言,使用磁传感器可以说是最好的选择,但另一方面,对于尺寸如此巨大的帆船和帆翼,在将磁编码器安装在支板上时,确保间隙公差严格满足要求也是很大的挑战。
了解路虎BAR帆船队的需求始终是最重要的方面,但由于时间紧迫,我们必须从已有的商用编码器模块中选择合适的技术。帆翼内部的空间和几何结构是决定编码器选型的重要因素。每个部件的挑选过程都是一项挑战;我们从一种直线磁栅模块开始着手,此模块可与一根精密电镀轴(表面下方刻有精细的凹槽)搭配使用,提供电镀轴的直线位移信息。我们必须使用新的工艺首先有效地“展开”原先刻在圆周上的代码,然后将这些代码(即形状不同的许多凹槽)刻到一个平面上,并使其呈弧形分布;我们希望由此得到的平面弧形栅尺能够一次性通过测试。
我们采用了来自雷尼绍关联公司RLS的现有LinACE™模块,并将其装入防水外壳中,这是我们首次尝试这种封装方式,目的是确保它能够经受住恶劣工作环境的考验。这个防水外壳本身还构成了编码器的本体,它的体积足够小巧,能够在帆翼翼肋内的狭小空间内工作。我们还要想出一个解决方案:当栅尺转动时,允许其同时出现扭转和俯仰运动,但不会使测量结果发生显著偏差。
 帆翼编码器解决方案
帆翼编码器解决方案您的解决方案是什么?
我们必须为传感器设计一个平衡支架结构,当弧形栅尺发生扭摆并偏离旋转平面时,借助该结构便不会在测量结果中引入误差。为此我们特别设计了一个铝质叉形连接臂,它将读数头准确固定在翼肋上,同时允许读数头在一定范围内上下左右移动。叉形臂连接的是帆翼的静态结构。借助这一整套编码器系统,我们可以得到每个控制翼面的精确位置读数,这比通过驱动装置来间接确定翼面位置要准确得多。
最大的挑战以及最让您引以为豪的事情分别是什么?
所有这些创新设计功能加在一起,便是整个编码器系统成功的关键,这包括新的磁栅尺制造工艺、塑料封装外壳、平衡及滑动支架,以及抵御恶劣气候环境的能力。这些方面出现任何问题都将导致无法在规定的期限内交付编码器。每一项创新设计本身都是一个独立的小项目,我们必须确保每项结果都能够一次性达到目标要求,而这便是最大的挑战。要在最短的时间内将所有这些创新设计成功整合到一起,制作出符合路虎BAR帆船队要求的编码器,这一切离不开我们在斯洛文尼亚的RLS公司的同事,以及雷尼绍内部制造工厂的同事的快速响应和全力支持。我为整个团队取得的成绩感到自豪。
 帆翼弧面性能分析
帆翼弧面性能分析如何使用位置反馈数据?
编码器的位置反馈数据会实时传输至帆船上的帆翼调整器,供其调整帆翼姿态;此外,船队还利用这些数据开展了大量研究工作,以此分析和改进帆船的控制精度和性能。











