工业控制环及其在光栅上的应用
现代控制技术简介
有很多种方法可消除精密运动平台设计中导致平台稳定性变差并发生定位偏差的因素。在整机设计环境下评估光栅性能时,控制环架构是一个重要的考虑因素。本文阐述了雷尼绍RESOLUTE™绝对式光栅系统在此类应用中的潜力 — 传统上只有周期误差在1 nm范围内的超细栅距增量式光栅才可胜任此类要求。尽管在某些应用中采用超细栅距系统是合乎情理的,但尽可能地寻找替代解决方案可能是更好的选择。与超细栅距光栅相比,RESOLUTE光栅具有如下优点:扭摆和间隙公差更宽松,无需返回基准位置,更容易安装,系统尺寸更小,工作速度大幅提高,栅尺选择更加灵活,比如长度更长、抗污性能更佳且成本更低 — 总拥有成本 (TCO) 因此更低。
标准的“比例-积分-微分 (PID)”控制器发明于大约90年前,但发展到现在,这种控制器通常已无法满足当今大部分要求苛刻的运动控制应用。控制器微处理功能的进步带来了现代控制方法。这些方法一般使用函数观测器来精确模拟系统。观测器使用输入电流和位置信息以及工厂(运动平台或其他设备)的标称参数,能够估算实际系统的速度、加速度和干扰信息。

图1:配有板载RESOLUTE光栅的ACS测试平台展示
ACS对RESOLUTE光栅的研究
最新的伺服控制算法,比如ACS的ServoBoost™,为负载、干扰、共振、坐标轴交互以及齿槽扭矩的变化提供实时自动补偿。这样一来,可以缩短系统进入稳定状态的时间,降低亚纳米级静止定位误差(抖动)并减少随后出现的误差。ServoBoost™及其他类似算法可用于半导体检测、平板显示器检测、电子元件装配及医疗诊断行业中的高性能伺服控制应用。比如,电子束光刻机的纳米定位平台一般可达到最小~1 nm的步长,而稳定时间仅需几微秒。影响运动平台性能的因素,包括材料硬度、轴承、机器轴的直线度和正交性、电机类型以及光栅误差等平台机械特性。
全球设备控制器制造商ACS与雷尼绍携手开发了一个试验平台(图1),用于评估采用ServoBoost™控制算法的RESOLUTE光栅系统性能。如今,带有BiSS®的RESOLUTE补充和完善了ACS的控制算法套件 — 在了解了客户的需求后,ACS采纳了雷尼绍的建议,在算法中加入了开放式BiSS串行通信协议。试验台是一个经改良的配有交叉滚子轴承的无铁直线伺服平台;装备单个1 nm分辨率的RESOLUTE光栅和一个备用超细栅距 (400 nm) 激光衍射系统。初步测试表明,每次“启动”控制算法时,相较于标准PID控制,平台性能有了显著提升。
图2显示了RESOLUTE光栅和备用超细栅距系统反馈的抖动性能比较。在使用标准PID控制器时,可以清晰地看到超细栅距系统的抖动性能更低,RESOLUTE光栅的测量抖动值为6.84 nm RMS(黄色),而超细栅距编码器为3.98 nm RMS(红色)。而使用ServoBoost™的效果则是可大大减少这些数值的差别和大小,分别达到1.91 nm RMS(绿色)和1.46 nm RMS(蓝色)。显然,强大的控制算法对这两种编码器系统的抖动性能差异进行了很大程度的补偿。
图3表明了在运动和稳定时间或跟踪误差方面亦有了显著改进。黄色曲线显示的是命令伺服平台改变位置然后保持静止的过程中平台的运动速度变化曲线(每格100 mm/秒),而绿色和红色曲线分别显示的是采用标准PID和ServoBoost™控制器时的位置误差(每格2微米)。高级控制算法显著改善了稳定误差和性能,并消除了使用PID控制器时向平台发出保持位置命令后随即出现的阻尼振荡。
精密运动平台性能由光栅精度、控制系统设计和平台自身硬件等因素综合决定。
通过与ACS合作开展研究,雷尼绍得出的结论是:相较于标准的“比例-积分-微分 (PID)”控制算法,诸如ServoBoost™这类高级控制器软件可实现更好、更一致的伺服性能,同时还可明显降低稳定位置误差。通过与雷尼绍合作,ACS在装备有1 nm分辨率RESOLUTE光栅和备用超细栅距产品的交叉滚子轴承直线平台上完成了测试,其结果证明:当RESOLUTE光栅反馈与ServoBoost™控制软件结合时,有效抖动降至2 nm RMS以下,这相当于高端精细栅距光栅的水平。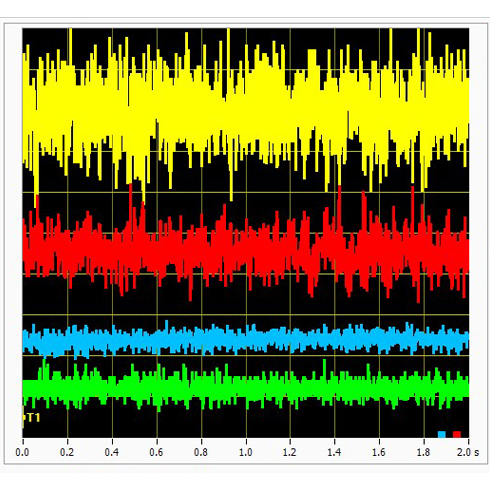 图2:RESOLUTE光栅和备用超细栅距系统反馈的抖动性能在一段时间内(以秒计)的比较
图2:RESOLUTE光栅和备用超细栅距系统反馈的抖动性能在一段时间内(以秒计)的比较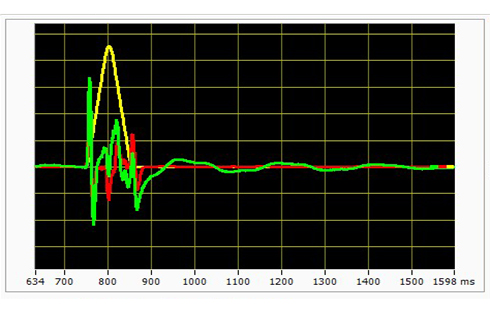
图3:RESOLUTE光栅和备用超细栅距系统反馈的运动和稳定性能在一段时间内(以毫秒计)的比较
ACS的ServoBoost™算法与雷尼绍的RESOLUTE光栅相结合,将有利于设备制造商在诸多要求严苛的应用中使用绝对式光栅,从而发挥绝对式光栅的优势,而传统上需要更为昂贵的激光增量式光栅才能满足这些应用要求。
ACS Motion Control(以色列)
ACS简介
ACS Motion Control是一家跨国公司,总部位于以色列的Migdal Ha-Emek,该公司为精密运动设备提供基于EtherCAT®网络的高性能机器控制系统。ACS Motion Control的高性能控制器和驱动器现在可与RESOLUTE绝对式光栅和BiSS串行通信协议兼容,这使得ACS的专有性能算法套件第一次具有了互操作性。该算法套件包括可选的ACS ServoBoost™和Smarter Gantry Control算法。
BiSS®为iC-Haus GmbH的注册商标。
资料下载


欲获取更多有关雷尼绍及其产品的图片、视频或信息,请访问我们的媒体中心。