机器人性能状况与校准跟踪软件
下载RCS Software Suite(软件包)
RCS Software Suite(软件包)操作简便,配有直观的操作指南,可引导用户逐步完成各项机器人设定与验证程序。
机器人参数设定与诊断操作引导流程
RCS Software Suite(软件包)是工业机器人校准与维护解决方案的配套软件包。通过RCS L-90和RCS T-90球杆仪系统,您可以跟踪机器人的关键性能状况与校准数据,生成可溯源的数据记录,为维护计划提供依据,有效减少停机时间。
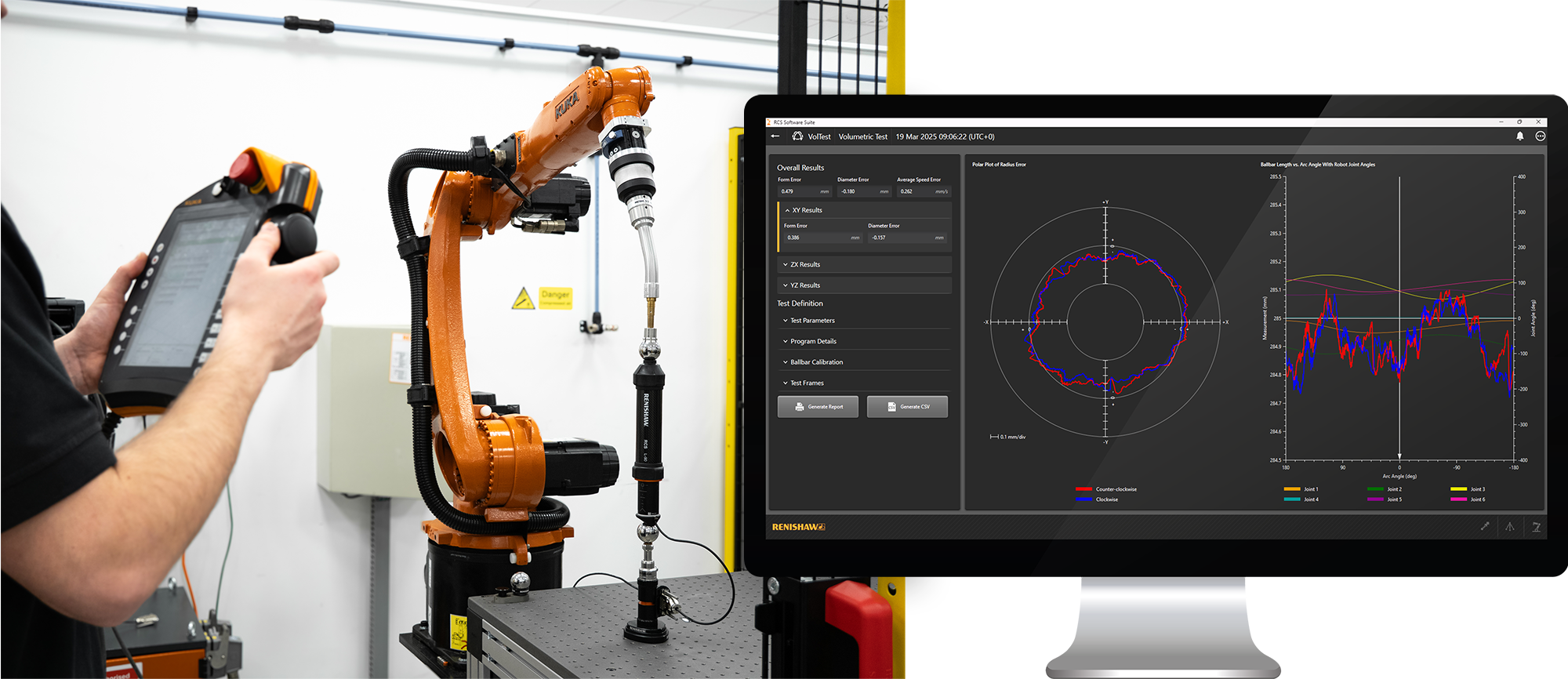
该软件包可在线或离线运行,支持使用单杆或三杆球杆仪系统执行多种测试程序。每个测试环节都提供分步操作说明,帮助您轻松设定工业机器人并评估性能。软件存储评估结果供日后参考,并生成相应的PDF报告或CSV文件。
RCS Software Suite(软件包)兼容常见工业机器人品牌,包括ABB、Fanuc、KUKA和Yaskawa。
利用RCS Software Suite(软件包)提升工业自动化水平
您可以通过在线和离线功能运行各类测试,包括机器人工具和工件坐标系的设定与验证、关节位置偏量、重复定位精度以及反向间隙测试等。设定机器人
通过一系列设置,为机器人投入生产做好准备。
- 工具坐标系:使用RCS L-90球杆仪精确定位末端执行器的工具中心点 (TCP)。
- 工具坐标系和机器人关节位置偏量:使用RCS T-90球杆仪采集数据,创建定位工具坐标系程序,以及识别关节位置偏量的机器人程序,实现现场重新校准。
- 工件坐标系:通过RCS工件坐标系组件的参考点,RCS L-90可快速定位工件坐标系。
- 测头校直:使用RCS P测头解决方案创建标准化机器人程序,轻松设定工具和工件坐标系。
跟踪机器人性能
通过一系列诊断测试,识别机器人的性能问题。
- 工具坐标系验证:围绕某一点旋转,检测TCP的稳定性。
- 单个和整体关节重复定位精度:在特定姿态下,控制单个关节或所有关节运动,以测试机器人的重复定位精度。
- 空间测试:测量机器人在XY、ZX和 YZ平面上沿圆形路径运动时的轨迹偏差。
监测机器人单元的关键精度数据
路径性能
机器人能否精准沿预设路径运行,是确保其工作效率的关键。绘制3D路径性能图,识别导致性能下降的根本原因。
重复定位精度
维护、校准以及关节稳定性都会影响机器人的重复定位精度。机器人能否稳定地重复执行相同动作,是保证生产效率的关键。
反向间隙
磨损、重载和碰撞问题都会对机器人的关节反向间隙造成影响,最终导致关节故障,甚至需要维修或更换部件,从而引发计划外停机。
RCS Software Suite(软件包)授权许可
RCS Software Suite(软件包)支持免费下载和安装。如需在机器人上使用RCS球杆仪运行测试,则需要购买1、3或5个用户的软件许可。
免费版本支持以下功能:
- 添加任意数量真实机器人系统信息,包括工具和工件坐标系数据。
- 导出/导入机器人系统数据。
- 定义机器人设定和验证测试的参数。
- 查看现有测试历史记录,生成PDF报告或CSV文件。
- 创建标准化机器人程序,与雷尼绍工业机器人测头解决方案(RCS P系列)配合使用。
RCS Software Suite(软件包)规格
雷尼绍RCS Software Suite(软件包)视频教程将指导您完成软件下载、机器人设定和RCS球杆仪连接等步骤。
计算机最低配置要求
如需运行RCS Software Suite(软件包),您的计算机需满足以下最低配置要求:
- 处理器:64位2 GHz
- RAM:4 GB
- 硬盘空间:2 GB
- 图形卡:支持DirectX 9或更高版本,并兼容WDDM 1.0驱动模型
- 显示器:1024 x 768
- 连接方式:USB2.0
推荐配置
为获得最佳使用体验,建议使用以下计算机配置运行RCS Software Suite(软件包):
- 处理器:2.80 GHz
- RAM:16 GB
- 硬盘空间:8 GB
- 图形卡:支持DirectX 9或更高版本,并兼容WDDM 1.0驱动模型
- 显示器:1920 x 1080
- 连接方式:USB2.0、以太网接口
立即联系我们的销售团队
请填写下表,了解更多信息或咨询我们的技术专家。