RESOLUTE™真正的绝对式光栅 — 通过位置确定和校验算法,有效提高安全性
本白皮书概述了RESOLUTE绝对式光栅的工作原理,并详细描述了其位置确定和校验算法的安全性。
引言
RESOLUTE系列真正的绝对式光栅的工作原理与传统的绝对式光栅截然不同,RESOLUTE能够在检测到位置输出不正确时设置并输出错误标记。因此,RESOLUTE可提高运动系统的最终用户的安全级别,同时帮助系统制造商简化设计流程。
RESOLUTE根据需求实时计算位置,而传统的绝对式光栅则是连续工作。在使用过程中,RESOLUTE读数头从主控制系统接收一系列请求信号。每次收到请求时,RESOLUTE都会通过两种独立的方法(如下所述)确定位置,二者的工作原理完全不同,从而避免了共因失效的风险。读数头随后将两种方法得出的位置进行比较,以决定是否设置错误标记,并将其附加到位置数据中,然后发送给控制系统。因此,控制系统可以依据读数头发出的错误标记运作。如果未设置错误标记,那么位置输出一定是正确的。
位置计算方法
RESOLUTE光栅使用在明亮基体上刻划暗色刻线的测量栅尺,如图1所示,基本栅距为30 µm,但是为了编码绝对位置信息,某些刻线会被省略。

图1:绝对式栅尺的图片
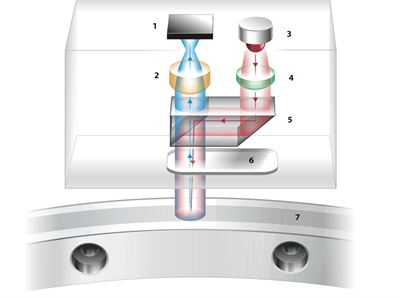
图2:RESOLUTE光学系统
1. 图像传感器;2. 探测器透镜;3. 发光二极管;4. 准直透镜;
5 分光棱镜;6. 读数头窗口;7. 绝对式栅尺
当光栅接收到位置请求时,RESOLUTE读数头会在精确的时间点拍摄栅尺上某个区域的快照图像。如图2所示,发光二极管 (LED) 和图像传感器上的电子光闸将被激活约100 ns,从而生成了一张时间精度为±20 ns且没有运动模糊的图像。然后,图像将被传输到读数头内的数字信号处理器 (DSP) 中,并通过两种不同的算法计算位置:
算法1通过解码单一图像计算位置,不需要使用之前的位置信息。第一个阶段是计算图像的相位,这个阶段与增量式光栅类似,得出的值小于或等于基本栅尺刻划周期,即0到30 µm之间的某个值,分辨率优于1 nm。栅尺的每张图像在测量方向上覆盖约2 mm的范围,栅尺的设计可确保每张图像中都有足够的暗色刻线用于精确地计算相位。通过计算相位可确定光栅的短距离精度、分辨率和抗噪性能。
相位信息可用于确定栅尺上每条潜在刻线的中心位置。然后对每个位置的图像进行相关性分析,以确定是否存在暗色刻线。这将生成一个65位二进制数,与读数头正下方的栅尺图案相对应。只需要其中四分之一的位数即可定义一个唯一的位置。其余的位数提供冗余信息,这样即使栅尺的某些部分被遮挡,也能确定正确的位置。然后,使用错误检测和修正算法将位序列转换为读数头的粗略绝对位置。通过算法1得出的完整位置由粗略位置(栅尺刻划周期的整数倍)与相位信息组合而成。
算法2根据前两个位置读数,通过线性外推法计算位置。算法2假设,光栅自采集前一个读数以来的速度,与在前两个位置之间测得的速度相同。计算的误差取决于连续读数之间的时间间隔、之前读数的精度、任何时间不确定性,以及读数头和栅尺之间的相对加速度。对于一个每62.5 µs发出一次位置请求的典型系统,读数头和栅尺之间的最大加速度为100 m/s2 (10 g),则算法2的最大误差为±1.2 µm。必要时,读数头会在两次请求之间额外拍摄图像,以确保图像之间的时间间隔不超过75 µs。
位置比较
只要计算出两个位置,RESOLUTE光栅就能决定输出哪个位置,以及是否设置错误标记。通过算法1得出的相位信息非常可靠。如果栅尺受到污染,那么相位信息中将包含更多噪声,并且可能失真。不过,即使在极端情况下,由此造成的位置误差也会小于1 µm。在栅尺受到严重污染的情况下,相位信息仍是可靠的,但粗略位置计算的纠错能力可能不足以正确解码绝对位置。
通过算法2得出的位置提供可靠的粗略位置,因为只有极端加速度 (> 2,000 m/s2) 才会造成足以改变粗略位置的误差。然而,由于算法2假设速度是恒定的,因此它得出的精细位置(相位)并不十分精确。
在运行过程中,如果两种算法得出的粗略位置一致,这相当于两个完整位置的差异在±15 µm(即栅尺刻划周期的一半)以内,那么读数头就会输出此粗略位置以及通过算法1得出的相位。与此同时,内部计数器将被设为零;这个计数器的重要性将在适当时候显现出来。如果两种算法得出的粗略位置不一致,那么读数头会输出通过算法1得出的相位信息和通过算法2得出的粗略位置,并使内部计数器递增。如果内部计数器的数值超过4,读数头就会设置错误标记,因为它不再确定位置输出是否正确。这时,我们不妨举例说明设置错误标记的原因:
示例1
假设RESOLUTE读数头经过一片受污染区域,其污染程度超过了栅尺编码的纠错能力。那么算法1将得出不正确的粗略位置。不过,尽管由于污染会造成亚微米级误差,但算法1仍将得出正确的相位。读数头将在内部记录两个粗略位置之间的差异(通过使内部计数器递增),并输出通过算法2得出的正确粗略位置以及通过算法1得出的正确相位。如果读数头使用连续五张图像都无法通过算法1确定正确的粗略位置,那么它会设置错误标记,以表示它不再确定位置是否正确。如果算法1使用不超过四张连续图像确定了正确的粗略位置,那么计数器将被重置,读数头会继续输出位置。
示例2
假设RESOLUTE读数头在正常运行时突然发生大约10,000 m/s2的加速度,相当于在100 µm的距离内从2 m/s减速到静止,这可能是由于机器在运行时撞上刚性限位档块造成的。在这种情况下,算法1得出的位置将始终正确,而算法2得出的位置将始终比正确位置滞后不超过几个栅尺刻划周期。读数头将(错误地)假设算法2得出的粗略位置是正确的,并将其与算法1得出的正确相位一起输出。从这时起,两种算法得出的粗略位置将始终不一致。读数头将计算出五个略微滞后于实际位置的位置,然后设置错误标记。
示例3
在本例中,假设两种算法同时失效。设想一种不太可能的情况:电离辐射破坏了RESOLUTE读数头处理器内的某个内存区域,导致两种算法得出的位置都被损坏。由于这两种算法计算位置的方式截然不同,即使受到损坏,它们也不会得出相同的错误答案。因此,读数头会识别出粗略位置的不同,并使计数器递增,输出由算法2得出的粗略位置和算法1得出的相位组成的不正确位置。因为算法2基于之前的读数计算位置,所以从这个点开始,它得出的答案将始终不正确。因此,即使算法1恢复并给出正确答案,读数头仍会在计算出五个不正确的位置后设置错误标记。
错误标记响应
如上述示例所述,读数头在设置错误标记之前最多输出五个不正确的位置。对于每62.5 µs发出一次位置请求的系统来说,从输出第一个不正确位置到设置错误标记之间的时间间隔为313 µs。对于以500 µs的间隔发出位置请求的慢速系统来说,这个时间间隔为500 µs,因为读数头会在两次请求之间额外拍摄六张图像,以确保图像之间的时间间隔不超过75 µs。在这两种情况下,输出不正确位置和设置错误标记之间的时间间隔都非常短,因此在不正确的数据影响控制系统之前便可采取适当的措施来响应错误标记。
图3和图4为栅尺污染示例,这些污染虽然不影响确定相位,但通常会导致无法提取绝对编码。在这些情况下,通过上述算法仍可持续输出正确位置,或者通过设置错误标记来发出警告。

图3:颗粒污染遮挡了栅尺上的大面积区域,但仍可确定相位信息
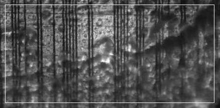
图4:油渍污染导致复杂的光散射,但对相位信息的干扰很小
系统启动
到目前为止,我们一直假设算法2总是有足够的历史数据来推算位置。但在读数头刚启动时,情况并非如此,因为没有推算位置可以与当前从栅尺上读取的位置进行比较。在这种情况下,通过下面两种方法可以提高读数头相对于栅尺的位置的置信度。
首先,如果图像对比度不足,那么读数头将自动设置错误标记。其次,限制容许纠错范围。由于栅尺编码使用冗余数据来确保不同的有效序列之间存在较大的位差,因此通过限制可纠正位数,可大幅降低将一个位序列不正确地解码为错误位置的风险。这两种限制意味着,读数头的抗污能力在启动期间会略有下降。不过,读数头在启动过程中会拍摄大量图像,以确保噪声不会限制其确定位置的能力,从而抵消这一影响。
此外,栅尺编码的设计可确保,即使在极不可能的情况下,读数头在启动过程中输出了一个不正确的位置,也能够在500 µm的移动距离内检测到这个误差,同时设置错误标记。
循环冗余校验 (CRC)
读数头计算出位置信息和错误信号后,就会计算循环冗余校验 (CRC),并将其附加到数据中,然后传输给主控制器。数据将通过双屏蔽电缆以差分信号的方式进行传输。主控制器在收到数据后可以重新计算CRC,并将其与传输的值进行比较。如果这两个值存在差异,则表明数据在传输过程中发生损坏。这样便能确保检测到位置信息或错误信号是否发生损坏。与传统正交系统相比,使用串行协议的另一个优点是每次传输都是独立的,因此传输中发生的错误不会累积。再结合RESOLUTE的独特工作原理,用户将获得高度安全保障,不会发生计数错误、位置漂移或“丢数”的情况。
