激光尺系统的工作原理是什么?
干涉测量法的工作原理是什么?
简介
迈克尔逊干涉仪是干涉测量中最常用的工具,由Albert Abraham Michelson(首位获得诺贝尔科学奖的美国人)于1887年发明。他发明了镜组和半透半反镜组(分光镜)系统,可将来自相同光源的分离光束融合在一起进行干涉测量。激光干涉测量法是一种久经验证、成熟可靠的高精度测距方法。
基本原理
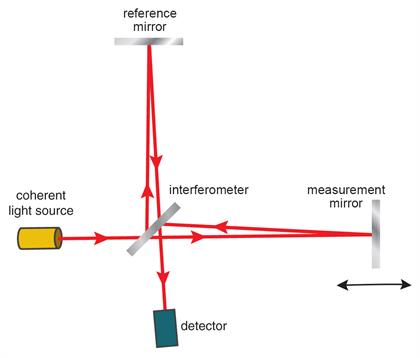
迈克尔逊干涉仪一般可将相干光源的单条射入光束分成两条相同的光束。每条光束的传播路径(称为光程)不同,并在到达探测器之前重新会合。每条光束的传播距离不同使它们之间产生相位差。正是该相位差在最初相同的光波之间形成可通过探测器进行识别的干涉条纹。如果单条光束沿两个光路分开(测量和参考光路),则利用相位差便可判断出所有可改变光束相位的因素。这可能是光路长度本身的物理变化,或者是光束传播介质的折射率的变化。
迈克尔逊干涉测量法
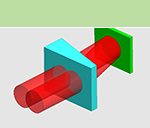
从激光源发出的激光光束 (1) 在干涉镜处被分成两束光(参考光束 (2) 和测量光束 (3))。这些光束从两个角锥反射镜反射回来,并在到达探测器前,在干涉镜处重新会合。
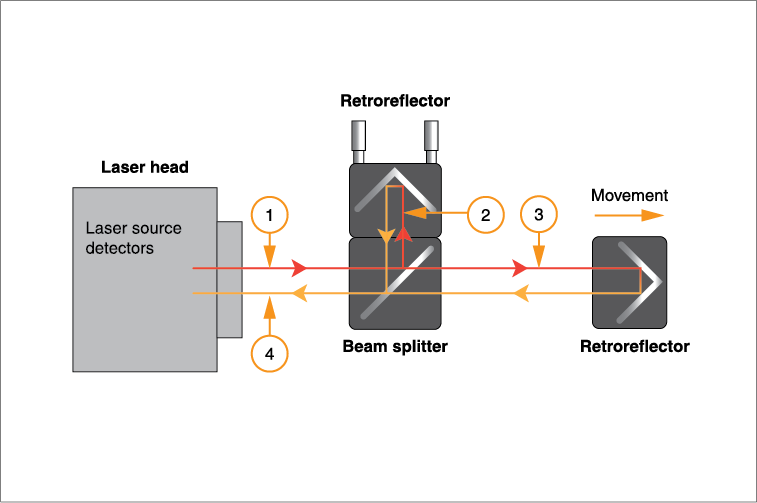
使用角锥反射镜可确保从参考臂和测量臂反射回的光束在干涉镜处重新会合时保持平行。重新组合的光束到达探测器后,以相长或相消的方式相互干涉。在相长干涉过程中,两束光同相,它们的波峰相互加强,产生明亮的干涉条纹;而在相消干涉过程中,两束光异相,其中一束光的波峰被另一束光的波谷抵消,形成灰暗的干涉条纹。
信号处理
探测器中的光学信号处理功能允许用户观察这两束光的干涉情况。测量光束的位移使两束光的相对相位发生变化。这一相消和相长的干涉循环导致重新组合的光束的光强发生周期变化。每次测量光束/角锥反射镜 (3) 移动距离为激光波长的一半时,光强度都会出现一次明-暗-明的周期变化。
系统的精度
线性定位测量精度取决于对激光光束波长的补偿精度。激光光束的工作波长取决于光透过空气的折射率,此波长会随着温度、气压和相对湿度发生变化。因此,需要改变(补偿)激光的波长,以纳入这些参数的任何变化。
RLE系统
RLE系统是独创的先进零差激光干涉测量系统,特别为位置反馈应用而设计。每套RLE系统均包含一个RLU激光装置和一个或两个RLD10发射头,具体型号取决于特定应用的要求。
主要组件:
RLE的工作原理是什么?
| 激光源 | 光纤耦合器 | 干涉仪光学镜组 | 测量光学镜组 | 检测装置 | 激光尺反馈信号 |
 |  |  |  |  |  |
RLU的工作原理是什么?
从RLU到RLD的激光输出
| 激光源 | 稳频电子器件 | 光纤耦合器 | 光束指向稳定性 |
|  | |  |
处理返回到RLD的信号
| 激光尺错误信号 | 系统状态 | 数字信号细分 | 激光尺模拟信号 |
|  |  |  |
RLD的工作原理是什么?
激光从RLD输出到测量光学镜组
| 干涉仪光学镜组 | 激光准直辅助镜 |
独创的光学装置,具有最小的SDE,可兼容平面镜或角锥反射镜测量光学镜组 |  内置光楔,用于通过简化光束角度调整,最大限度减少安装时间 |
激光从测量光学镜组输入到RLD
| 激光尺模拟信号 | 检测装置 | 测量光学镜组 |
 由检测装置生成并直接传送到RLU系统的内置模拟正交信号 | 内置干涉条纹检测装置,可将来自测量和参考光束的干涉条纹转化为电子信号 | 高反射硬氧化物涂层介质镜 |
HS20系统

雷尼绍HS20激光头配合外部线性光学镜组件使用时,可组成非接触式干涉测量激光尺系统,用于长轴高精度线性位置反馈。
如果一个运动控制系统能够配置为接受数字或模拟正交格式的激光尺信号,HS20激光头便可集成到该系统的位置控制回路中。激光头可直接替代直线光栅系统用于OEM和改造应用中。
HS20的工作原理是什么?
| 激光源 | 稳频电子器件 | 测量光学镜组 | 错误和警告 | 激光尺反馈 信号 |
 稳频二类 (<1 mW) HeNe激光 |  用于通过调节激光管加热器组件来控制激光稳频精度 |  适合机器轴长度达60 m的长距离光学镜组解决方案 |  有效的错误线路,独立对应每个激光轴,可轻松集成到机器控制系统中以实现闭环运行 | 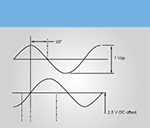 适用于高分辨率位置反馈的行业标准数字或模拟正交信号 |
补偿系统
激光干涉仪常常被假定为可自动提供最高精度的测量结果。但实际上情况会更加复杂。使用激光在空气中测量线性位移时,环境补偿系统的性能极为重要。激光和干涉测量光学镜组可提供很高的线性分辨率和精度,但对于非真空环境应用,系统测量精度却主要由环境补偿装置决定。
位移采用指定波长表示。因此,精确且可重复的测量取决于波长的一致性。当激光光束通过空气传播时,波长将根据折射率发生变化。另一方面,激光尺的测量没有考虑温度变化引起的工件或机器结构的热膨胀。
为了补偿上述的误差源并确保非真空环境应用测量的更高精度,必须使用补偿系统。
影响精度的环境因素
折射率因素:
 |  |  |
气温 | 相对湿度 | 气压 |
热膨胀:
 |
材料温度 |
RCU10补偿系统
RCU10实时正交补偿系统可消除线性运动系统中的环境误差源,提高过程精度和可重复性。RCU10可通过一系列传感器监控机器周围的环境,并采用先进的数字信号处理技术对位置反馈信号进行实时补偿。该装置以模拟或数字激光尺信号格式向运动控制器提供已修正的反馈信号。

RCU10的工作原理是什么?
下图说明了RCU10的工作流程。
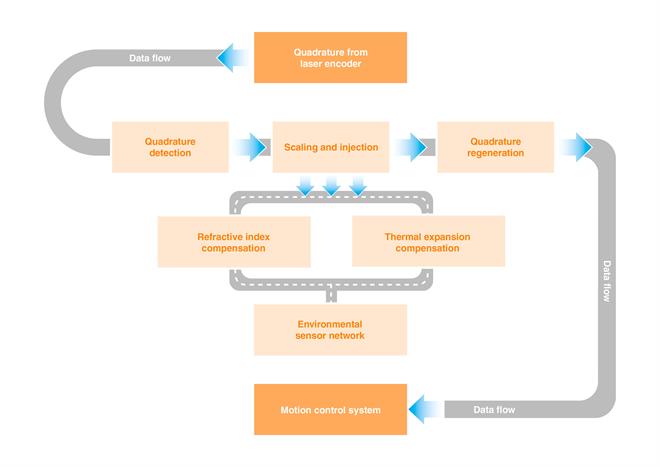
RCU10补偿装置接收数字正交信号以及通过一系列传感器采集的环境数据,并计算修正轴位置所需的补偿总量。然后通过正交信号缩放和注入(添加或移除正交脉冲)将所需的补偿应用到激光尺反馈信号中,整个过程均可确保运动控制器的延迟极小。已补正的反馈信号以数字或模拟激光尺信号格式被发送到运动控制器。
浏览我们的为什么要使用激光尺网页,深入了解我们产品的工作原理,以及如何帮助您优化制程。
立即联系我们的销售团队
欢迎联系雷尼绍分支机构获取更多信息,或者咨询我们的技术专家。